privatevoidcancelAcquire(Node node){ // Ignore if node doesn't exist if (node == null) return;
node.thread = null;
// Skip cancelled predecessors Node pred = node.prev; while (pred.waitStatus > 0) //cancelled node.prev = pred = pred.prev;
// predNext is the apparent node to unsplice. CASes below will // fail if not, in which case, we lost race vs another cancel // or signal, so no further action is necessary. Node predNext = pred.next;
// Can use unconditional write instead of CAS here. // After this atomic step, other Nodes can skip past us. // Before, we are free of interference from other threads. node.waitStatus = Node.CANCELLED;
// If we are the tail, remove ourselves. if (node == tail && compareAndSetTail(node, pred)) { compareAndSetNext(pred, predNext, null); } else { // If successor needs signal, try to set pred's next-link // so it will get one. Otherwise wake it up to propagate. int ws; if (pred != head && ((ws = pred.waitStatus) == Node.SIGNAL || (ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) && pred.thread != null) { // if执行的逻辑是把前置节点设置成Node.SIGNAL Node next = node.next; if (next != null && next.waitStatus <= 0) // 把node的前置前置节点的下一个节点指向node的下一个节点,因为上面node已经是Node.CANCELLED状态了,需要踢出队列 compareAndSetNext(pred, predNext, next); } else { // 前置节点是head,此时没有被人竞争锁资源,直接唤醒当前节点 unparkSuccessor(node); }
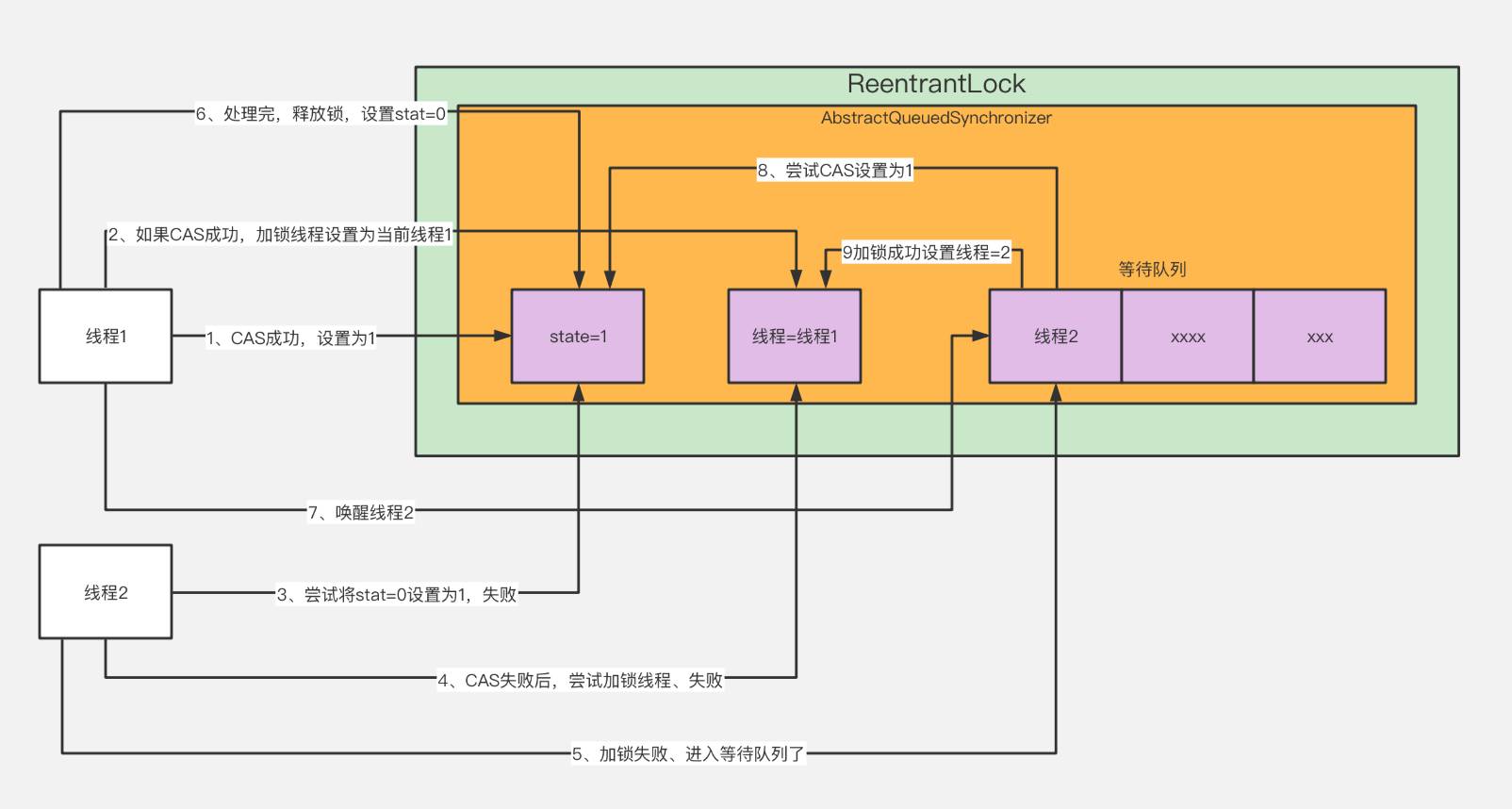
/** * Fair version of tryAcquire. Don't grant access unless * recursive call or no waiters or is first. */ protectedfinalbooleantryAcquire(int acquires){ final Thread current = Thread.currentThread(); int c = getState(); if (c == 0) { if (!hasQueuedPredecessors() && compareAndSetState(0, acquires)) { setExclusiveOwnerThread(current); returntrue; } } elseif (current == getExclusiveOwnerThread()) { int nextc = c + acquires; if (nextc < 0) thrownew Error("Maximum lock count exceeded"); setState(nextc); returntrue; } returnfalse; } }
privatevoidunparkSuccessor(Node node){ /* * If status is negative (i.e., possibly needing signal) try * to clear in anticipation of signalling. It is OK if this * fails or if status is changed by waiting thread. */ int ws = node.waitStatus; // if (ws < 0) compareAndSetWaitStatus(node, ws, 0);
/* * Thread to unpark is held in successor, which is normally * just the next node. But if cancelled or apparently null, * traverse backwards from tail to find the actual * non-cancelled successor. */ Node s = node.next; if (s == null || s.waitStatus > 0) { s = null; // 这里是共享锁,在ReentarntLock先跳过 for (Node t = tail; t != null && t != node; t = t.prev) if (t.waitStatus <= 0) s = t; } if (s != null) LockSupport.unpark(s.thread); }